











股票动态
688066.SH
00.00

+0.00
+0.00%
建设“女娲”星座,助力时空大数据商业化
2022 年 12 月 19 日晚,公司发布公告,拟合作设立两只专项投资基金,
基金规模分别为 5.68 亿元、不低于 5 亿元,航天宏图作为有限合伙人计划分
别出资 1.5 亿元、不超过 1.25 亿元,分别认购株洲太空星际卫星科技有限公司
(简称“株洲太空星际”)、济宁太空星际信息技术有限公司股权(简称“济宁
太空星际”),用于“女娲”雷达卫星星座建设。此外公司于 2022 年 11 月 28
日向不特定对象发行了总额约 10.09 亿元的可转债,将于 2022 年 12 月 22 日
起在上交所挂牌交易,债券简称“宏图转债”。
投资建设“女娲”雷达星座,加码布局上有数据源-安信证券
12 月 20 日,航天宏图发布公告称,拟参与设立两个专项投资基金,
合计对外投资 2.75 亿元。1)公司拟出资 1.5 亿元,用于设立株洲迪
策鸿卫北斗投资合伙企业(公司占比 26.4%),并通过专项投资基金
认购株洲太空星际卫星科技有限公司公司股权,用于“女娲”雷达卫
星星座建设。2)公司拟出资 1.25 亿元,用于设立济宁东方星际投资
合伙企业(公司占比 25%),并通过专项投资基金认购认购济宁太空
星际信息技术有限公司股权,用于“女娲”雷达卫星星座建设。
投资建设“女娲”遥感卫星星座,数据服务能力有望 全面升级
我们维持公司 2022-2024 年归母净利润预测为 2.92、4.49、6.23 亿元,EPS 为 1.58、
2.43、3.37 元/股,当前股价对应 2022-2024 年 PE 为 48.5、31.6、22.8 倍,考虑
公司在遥感卫星应用领域的领先地位,维持“买入”评级。
股票动态
688066.SH
00.00
+0.00
+0.00%
DYNAMICS
PIE-Engine
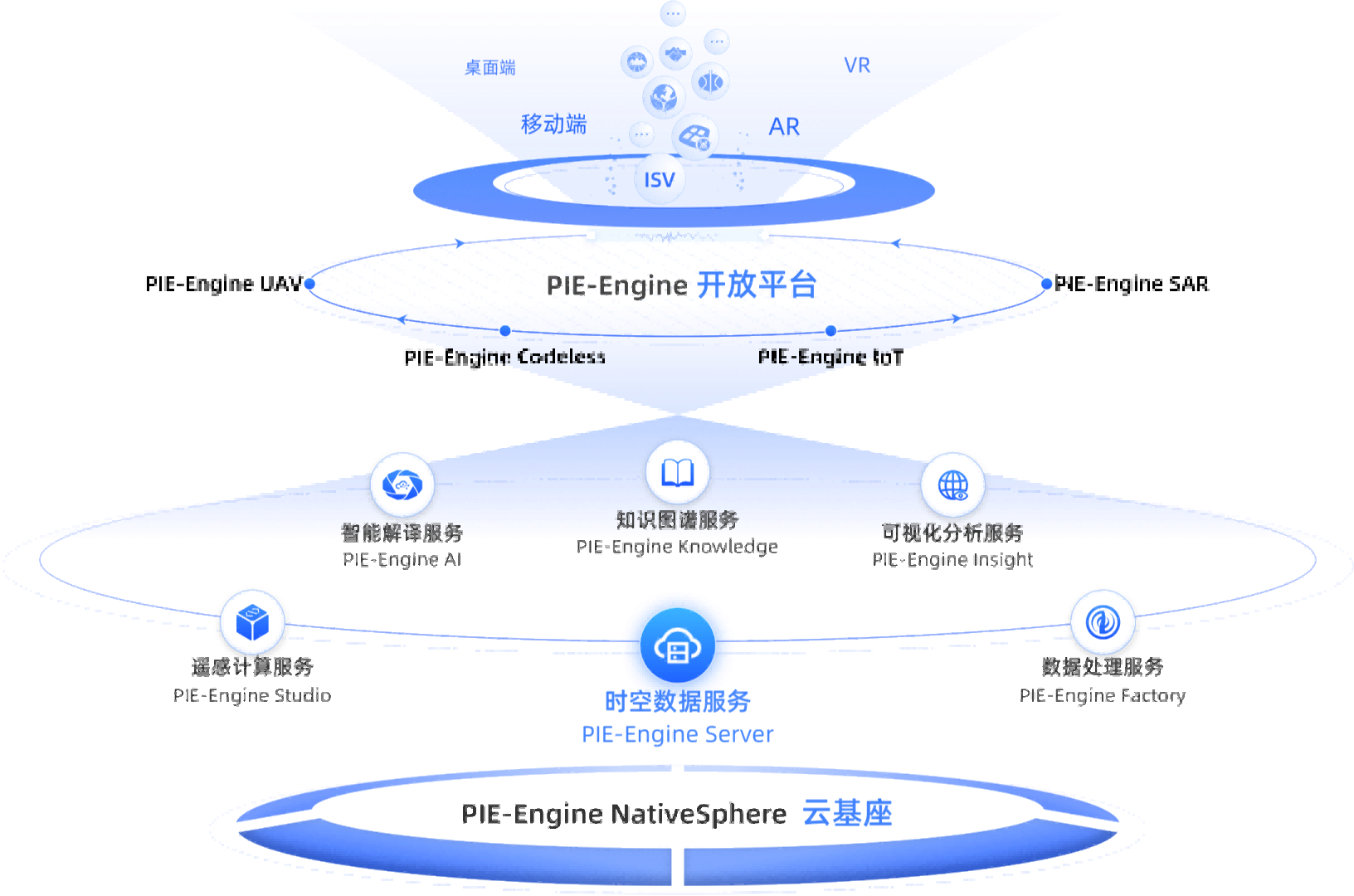
一站式地球科学大数据实时计算平台
PIE-Engine(Pixel Information Expert
Engine),航天宏图公司独立自主研发,基于云计算、物联网、大数据和人工智能等一站式地球科学大数据实时计算平台。平台自主构建并行高效的底层架构,全流程业务实时可视,包括无人机、卫星遥感影像等多源数据,虚拟仿真、城市实景三维建模等多维框架,让数据随取随用,为用户提供
“云+端”
、“平台+SaaS”应用模式,助力地球科学应用产业化发展。PIE-Engine旨在构建全新地球云生态,实现时空信息融合与多维数据感知,赋能大产业,共建生态圈,为世界带来美好而改变。
查看详情
PIE-Engine
一站式地球科学大数据实时计算平台
PIE-Engine(Pixel Information Expert
Engine),航天宏图公司独立自主研发,基于云计算、物联网、大数据和人工智能等一站式地球科学大数据实时计算平台。平台自主构建并行高效的底层架构,全流程业务实时可视,包括无人机、卫星遥感影像等多源数据,虚拟仿真、城市实景三维建模等多维框架,让数据随取随用,为用户提供
“云+端”
、“平台+SaaS”应用模式,助力地球科学应用产业化发展。PIE-Engine旨在构建全新地球云生态,实现时空信息融合与多维数据感知,赋能大产业,共建生态圈,为世界带来美好而改变。
查看详情
女娲星座
“女娲星座”是航天宏图紧盯国家重大战略需求,瞄准“数据获取时效差、信息处理链条长、协同运控不智能、大众应用不便捷”等行业痛点,围绕卫星互联网新业态,发力高分遥感全产业链构建,旨在实现对地观测全球快速重访,利用激光星间通信组网,构建的全球自主可控实时遥感混合星座。一期工程包括
44 颗雷达卫星组成的雷达遥感星座和 10 颗光学卫星组成的光学遥感星座,计划于2023年至2025年建设完成。
2023年3月30日在太原卫星发射中心成功发射的4颗高分辨率X波段合成孔径雷达卫星,是航天宏图“女娲星座”首发星,是全球首个采用四星车轮式(Cartwheel)编队构型的多星多基线分布式干涉合成孔径雷达卫星系统。该星座具备高精度测绘、高分宽幅成像及形变监测等能力,可快速、高效地制作高精度数字表面模型(DSM)并完成全球非极区测绘任务,具备在1年内完成全球陆地范围测图任务的能力,可提供多类型遥感数据产品,在城市地质灾害监测、海洋监测、洪涝灾害监测、地表沉降监测等方面具备极大优势,显著填补国内InSAR卫星应用市场空白。
2023年3月30日在太原卫星发射中心成功发射的4颗高分辨率X波段合成孔径雷达卫星,是航天宏图“女娲星座”首发星,是全球首个采用四星车轮式(Cartwheel)编队构型的多星多基线分布式干涉合成孔径雷达卫星系统。该星座具备高精度测绘、高分宽幅成像及形变监测等能力,可快速、高效地制作高精度数字表面模型(DSM)并完成全球非极区测绘任务,具备在1年内完成全球陆地范围测图任务的能力,可提供多类型遥感数据产品,在城市地质灾害监测、海洋监测、洪涝灾害监测、地表沉降监测等方面具备极大优势,显著填补国内InSAR卫星应用市场空白。

产品中心
公司研发了具有完全自主知识产权的遥感软件PIE(Pixel Information
Expert),拥有国内首个遥感云服务平台PIE-Engine,实现遥感基础软件的国产化替代,为政府、企业、高校以及其他有关部门提供基础软件产品。

News Center
新闻中心
News Center
新闻中心





科技改变世界 遥感走进生活
